Zoro Feigl – Glider #SWI2022
Introduction
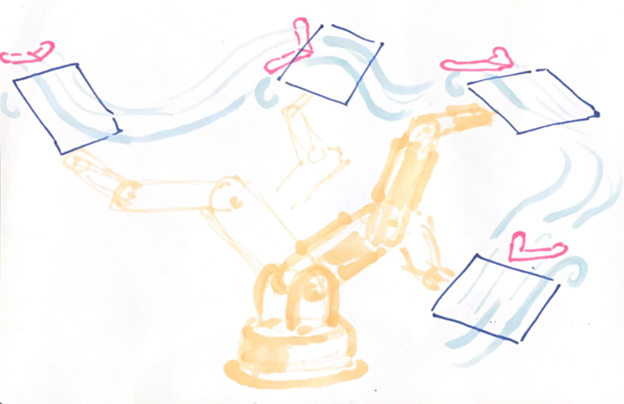
An artwork about control and letting-go: A dance of visible and invisible forces and the extreme powers that are needed to control the ephemeral. A high-tech child’s play flows through the space with heavy-duty industrial machinery.
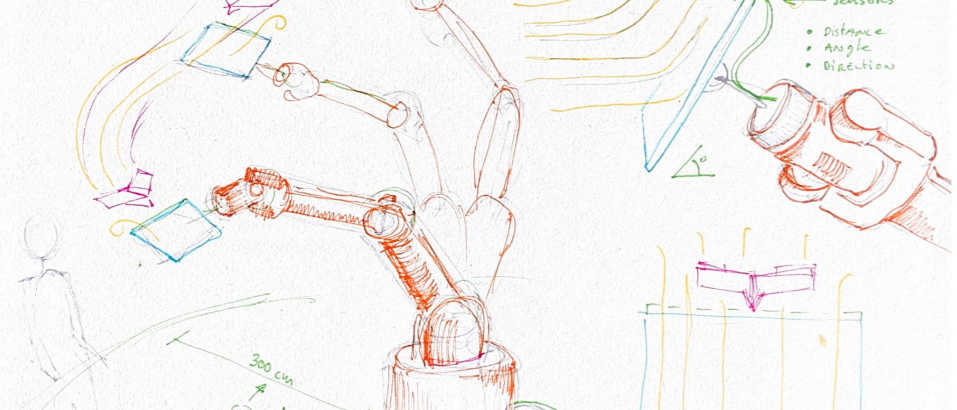
An industrial robot arm moves its limb elegantly high above the viewer. The gentle, but fiercely moving machine thrusts a paper plane on an invisible air wave generated by its movements. The robot senses the position of the plane and constantly adjusts the wave it makes to keep the plane airborne.
This SWI project will lay the foundations for developing a sculpture that consists of a small paper plane and a 6-axis robot arm with a 6 meter diameter reach. The type of plane is known as a walkalong glider or controlled-slope soaring plane. The airwave is made by the industrial robot arm with a paddle. Based on measurements of the location and the velocity of the plane, the goal is control the robot arm such that different choreographies/flightpaths can be generated.
An impression:
Challenge
The challenge of this SWI 2022 project is to model this scenario and to develop a control strategy for the robot arm. The model will be partly based on experiments done during SWI with the artist. The aim of these experiments is to learn about glider plane dynamics and to try different configurations of planes and paddles. Moreover, they enable to analyze the effect of perturbations like movement close to the installation and wind. Complete specifications of the intended robot arm to be used will be provided.
In addition to providing a control strategy, the goal of the resulting model is to provide insight into various aspects that will help to make design decisions later parts of the project.
The first aspect is related to the choreographies/flightpaths that can be achieved. What is the minimum turning radius of the plane that can be supported? What is the maximum diameter of the flightpaths?
The second aspect is robustness. Which perturbations, in the form of wind and movement by visitors, can be tolerated?
The third aspect is the robot arm itself. Is the intended robot suitable for this project? Does the robot impose constraints on the achievable flightpaths or robustness? If so, what are the recommendations with respect to the robot arm that will be used in further development.
The fourth and final aspect is related to the measurements on the plane and the environment. The input for the SWI challenge is a proposed accuracy and sampling rate for measurements of plane location and velocity. Is this proposal suitable in relation to achievable flightpaths and robustness? If not, what are the recommendations. Also, in case robustness is problematic, can it be improved with additional measurements (on environment, air flows, …)?

Acknowledgement
This artwork is developed by Zoro Feigl with the knowledge and funding of these partners:
- TETEM Enschede
- HIGHLIGHT Festival
- Study Group Mathematics with Industry (SWI)
- University of Twente, Data Science & AI Lab of Faculty EEMCS
- Mondriaan Fund